|
ДРУГИЕ ВИДЫ АКУСТИЧЕСКОГО ОФОРМЛЕНИЯ ГОЛОВОК
В предыдущих главах рассматривались наиболее часто применяемые виды АС. Однако существует еще целый ряд видов систем,
применяемых значительно реже. Здесь будут рассмотрены: акустический лабиринт, рупорная акустическая система, электростатическая
акустическая система, а также акустическая система с электромеханической обратной связью (ЭМОС).
Для того чтобы избежать акустического «короткого замыкания», можно использовать акустическое оформление с лабиринтом.
Один из вариантов конструкции этого вида оформления фирме Akai (Япония) приведен на рис. 68. Акустическая система состоит
из корпуса, на передней стороне которого укреплена головка 1. Задняя сторона диффузора головки работает на образованный
рядом перегородок 2 зигзагообразный звукопровод — лабиринт. Второй конец лабиринта заканчивается выходным
отверстием 3 на одной из стенок корпуса. Поперечное сечение лабиринта— обычно прямоугольное или круглое, площадь
которого равна эффективной площади диффузора головки Sэфф. Выпрямленная длина лабиринта должна быть равна
1/2λ на нижней граничной частоте воспроизводимого диапазона частот. Благодаря этому излучение из выходного отверстия
лабиринта будет совладать по фазе с излучением передней стороной диффузора головки. Так, если нижняя граничная частота воспроизводимого
диапазона 30 Гц (длины волны 11,4 м), то выпрямленная длина трубы лабиринта должна быть 5,7 м. Конечно, если лабиринт будет
иметь больше колен, конструктивная глубина корпуса АС будет соответственно меньше. Для уменьшения влияния на частотную
характеристику системы частных (высших) резонансов трубы ее стены желательно покрывать звукопоглощающим материалом, например,
слабо набитыми и простеганными ватными матами. Однако конструкции АС с лабиринтом тем не менее довольно громоздки, вследствие
чего редко применяются, несмотря на то, что от них можно получить хорошие результаты
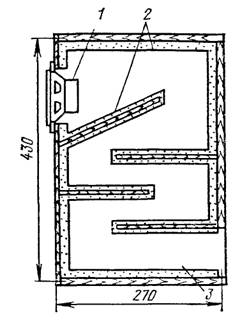
Рис. 68. Лабиринт фирмы Akai в разрезе
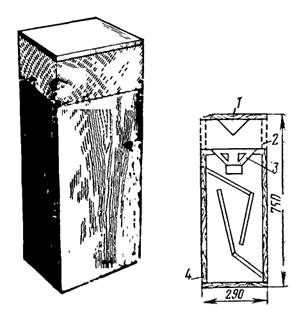
Рис. 69. Внешний
вид (а) и разрез (б) радиального комнатного лабиринта
На рис. 69 показан разрез другой конструкции с лабиринтом. Здесь над головкой 3 укреплен рассеиватель 1 для
излучения звука в горизонтальной плоскости. Звук излучается через отверстия 2 и 4.
Электродинамическая головка может быть нагружена на рупор. Известны две модификации устройства рупорных головок. В первой
из них, так называемой широкогорлой, горло рупора непосредственно примыкает к диффузору головки. За счет того, что устье
имеет диаметр больше диаметра диффузора головки, направленность такого рупора острее направленности головки. Поэтому звуковая
энергия концентрируется на оси рупора и звуковое давление здесь возрастает.
Во второй модификации (узкогорлой) рупор сочленяется с диафрагмой (диффузором) головки через предрупорную камеру, играющую
роль, аналогичную роли электрического согласующего трансформатора. Здесь согласуются механические сопротивления подвижной
системы головки и горла рупора, что увеличивает нагрузку на диафрагму и как бы повышает ее сопротивление излучения, благодаря
чему сильно повышается коэффициент полезного действия. Таким образом, это дает возможность получить большое звуковое давление.
Имеется много различных типов рупоров, но практически наиболее часто применяют в бытовой аппаратуре экспоненциальный
рупор, сечение которого изменяется по закону
 | (50) |
где S0 — площадь входного отверстия рупора, β — показатель экспоненты.
На рис. 70 приведены различные профили рупоров.
Как можно вывести из выражения (50), поперечное сечение такого рупора увеличивается на одинаковое процентное значение
через каждую единицу его осевой длины. Значение этого процентного приращения определяет нижнюю граничную частоту рупора.
На рис. 71 представлена зависимость процентного приращения поперечного сечения на 1 см осевой длины от нижней граничной частоты.
Так, например, чтобы обеспечить воспроизведение рупором нижней граничной частоты 60 Гц, площадь поперечного сечения должна
увеличиваться на 2% через каждый 1 см его осевой длины. Эту зависимость можно представить и в виде следующего выражения:

где k — приращение площади поперечного сечения, %.
Для низких частот (до 500 Гц) это выражение упрощается и принимает вид fгр.н = 27k.
Если рупор делается квадратного или круглого сечения, то сторона квадрата или диаметр круга должны увеличиваться на каждый
1 см длины рупора на √k процентов. Если же его делают прямоугольного сечения с постоянной высотой, то ширина
сечения рупора должна увеличиваться на k процентов на каждый 1 см его длины.
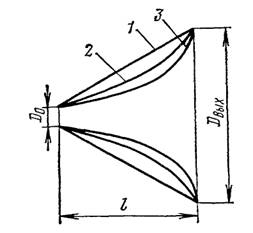
Рис. 70. Профили применяемых рупоров: 1 — конический;
2 — экспоненциальный; 3 — гиперэкспоненциальный
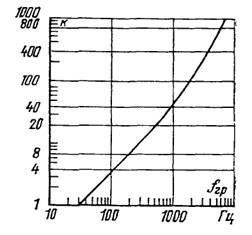
Рис. 71. Зависимость процентного приращения площади поперечного сечения
рупора на 1 см его осевой длины от нижней граничной
частоты
Однако выдержать необходимое процентное увеличение сечения еще недостаточно для хорошего воспроизведения низких частот.
Нужно иметь достаточную площадь его выходного отверстия — устья. Его диаметр (или диаметр равновеликого круга) должен быть

Так, для нижней граничной частоты 60 Гц диаметр устья составит около 1,8 м. Для более низких граничных частот размеры
устья будут еще больше. Кроме того, рупорная головка, хорошо воспроизводя низшие частоты (выше /гр.н), недостаточно хорошо
воспроизводит широкий частотный диапазон. Учитывая это, целесообразно иметь две рупорные головки: одну для воспроизведения
>низких, а другую — для высоких частот. На рис. 72 представлен внешний вид и сечение такой АС с двумя рупорными головками
и фазоинвертором для воспроизведения частот ниже fгр.н рупора.
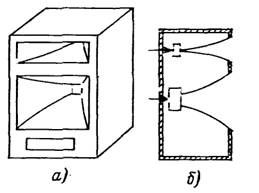
Рис. 72. Внешний вид (а) и разрез (б) акустической системы
с двумя рупорными головками и фазоинвертором
Применение низкочастотных рупорных оформлений в жилых помещениях ограничено размерами помещения. Однако, если такая возможность
имеется, тo расчет рупора следует начинать, задавшись площадью устья по выбранной нижней граничной частоте, уменьшая сечение
на k процентов на каждый
1 см осевой длины до тех пор, пока не достигают площади сечения, равной площади диффузора головки. При этом, для
того чтобы сопрячь головку с широкогорлым рупором, рупор должен иметь сечение той же формы, т. е. круглое или эллиптическое.
Для узкогорлых рупоров идентичность формы сечения и диафрагмы головки необязательна, так как горло и диафрагма сочленяются
через предрупорную камеру. Отметим, что высота камеры должна быть существенно больше амплитуды колебаний подвижной системы
головки во избежание возникновения сильных нелинейных искажений из-за несимметричности деформации объема воздуха в камере.
Однако слишком большая высота предрупорной камеры ухудшает воспроизведение высоких частот.
Иногда, чтобы уменьшить габаритные размеры АС, применяют свернутые рупоры, различные конструкции которых показаны на
рис. 73. Свернутые рупоры рассчитывают практически так же, как и обычные. При расчете профиля необходимо следить за тем,
чтобы в местах перехода (сгиба колен) не было резких изменений сечений, вызывающих нерегулярности в частотной характеристике.
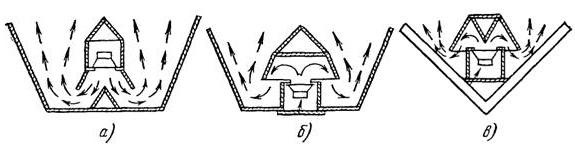
Рис. 73. Конструкции свернутых рупоров
Ранее описывалось устройство электростатической головки и отмечалось, что такие головки используют преимущественно только
как высокочастотные из-за целого ряда сложностей, возникающих при конструировании низкочастотных электростатических головок.
Здесь описывается конструкция и устройство первой отечественной широкополосной головки (системы) ГСШ-1. Устройство
(рис. 74) выполнено в виде плоской конструкции и состоит из шести односекционных низкочастотных панелей (1—3,
7—9) и одной трехсекционной — средних и высоких частот, причем секции 4, и воспроизводят
только средние частоты, а секция 5 — средние и высокие. Чувствительность системы зависит от площади поверхности головки
и от площади отверстий в электродах. Зазор мембрана-электрод на низкочастотных панелях достигает 2 мм. Для мембраны применяется
алюминированная пленка из полиэтилентерефталата толщиной 6 мкм. Панели излучателей монтируются на деревянную раму, в нижней
части которой устанавливаются элементы блока питания.
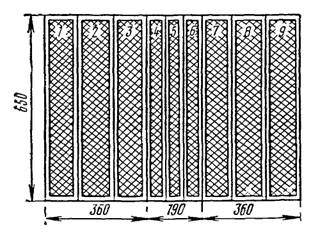
Рис. 74. Изображение широкополосной электростатической акустической системы ГСШ-1
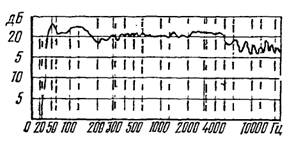
Рис. 75. Частотная характеристика ГСШ-1
На рис. 75 представлена частотная характеристика этой электростатической системы. Ее основные технические параметры следующие:
Мощность.......................................................................................... 20 Вт
Номинальное электрическое сопротивление на частоте 1000 Гц.......... 8 Ом
Номинальный диапазон частот........................................................... 40 Гц — 30 кГц
Среднее стандартное звуковое давление........................................... 0,25 Па
Неравномерность частотной характеристики ...................................... 8 дБ
Суммарный коэффициент гармоник искажений .................................. 1%
Габаритные размеры.......................................................................... 87×69×60 см3
Принцип использования электромеханической обратной связи (ЭМОС) для улучшения частотных характеристик АС известен давно.
Однако .так же, как и к АС ПИ, практический интерес к этим системам пробудился всего несколько лет назад (конструкции фирм
Philips, Matsushita, Голландия, Япония).
В АС с ЭМОС используется отрицательная обратная связь от колебаний подвижной системы головки, ускорение которой пропорционально
звуковому давлению системы. При этом э. д. с, создаваемая за счет колебаний подвижной системы (рис. 76), подается на вход
усилителя в противофазе со входным напряжением. С помощью ЭМОС возможно решить две задачи: расширить воспроизводимый диапазон
частот в более низкочастотную область и уменьшить коэффициент гармоник в области низких частот.
На рис. 77 приведены типичные частотные характеристики АС без ЭМОС (1) и с ЭМОС (2). Как видно, частотная
характеристика АС расширяется в сторону более низких частот (в данном примере со 100 до 32 Гц). Однако введение ЭМОС понижает
уровень звукового давления (в данном примере на 10 дБ). Поэтому, чтобы получить прежний уровень звукового давления, необходимо
увеличить мощность оконечного усилителя.
На практике применяют комбинированную ЭМОС по колебательной скорости и колебательному ускорению, которая может быть получена
двумя способами. Первый способ прост и не требует каких-либо изменений в конструкции головки. Сигнал для получения ЭМОС
снимается непосредственно со звуковой катушки головки. Для выделения этого сигнала применяются мостовые
схемы. На выходе моста создается напряжение, пропорциональное скорости подвижной системы головки, которое затем дифференцируется,
чтобы получить сигнал, пропорциональный ускорению и оба напряжения подаются на вход усилителя. Недостаток этого способа
— трудность балансировки моста в достаточно широком диапазоне частот.
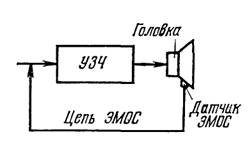
Рис. 76. Схема выполнения ЭМОС
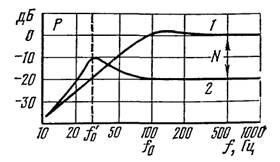
Рис. 77. Частотные характеристики АС с ЭМОС
Другой способ требует применения дополнительного датчика измерителя ускорения — акселерометра. Обычно акселерометр представляет
собой пьезокерамический диск диаметром 8—12 мм и толщиной 0,5—1,0 мм. Обе его поверхности металлизированы и каждая имеет
отвод. На наружную поверхность прикреплен (наклеен) грузик массой в несколько граммов. Датчик закрывается защитным кожухом.
С помощью датчика снимается сигнал, пропорциональный ускорению подвижной системы головки, т. е. пропорциональный звуковому
давлению. Этот сигнал после коррекции подается на вход усилителя.
Такой способ получения ЭМОС более сложен, но способен обеспечить достаточное высокие технические характеристики АС. Примером
АС с ЭМОС является электрофон 22RH 532 фирмы Philips в низкочастотной головке которого применена ЭМОС. Резонансная частота
низкочастотной головки без ЭМОС равна 80 Гц. Объем закрытого оформления составляет 15 л. Частотная характеристика этой
АС имеет неравномерность 5 дБ и простирается от 30 Гц.
В.К. Иофе, М.В. Лизунков
Часть [1]
[2]
[3]
[4]
[5]
[5]
[7]
[8]
[9]
[10]
[11]
[12]
[13]
|











